„A relativitás elmélet alapjai” változatai közötti eltérés
(→Pontrészecske mozgásának a leírása) |
(→4-es formalizmus, kinematika) |
||
| 148. sor: | 148. sor: | ||
A négyessebesség abszolútértékére kapott egyenlőség deriválásával könnyen belátható a <math>a_{\mu} u^{\mu} = 0</math> összefüggés is. | A négyessebesség abszolútértékére kapott egyenlőség deriválásával könnyen belátható a <math>a_{\mu} u^{\mu} = 0</math> összefüggés is. | ||
| + | |||
| + | |||
| + | ===Egyenletesen gyorsuló mozgás=== | ||
| + | |||
| + | (ez egy jól követhető, szemléletes példa lenne az előző szakaszban bevezetett fogalmakra és gyakorlati alkalmazásukra) | ||
==Relativisztikus fizika== | ==Relativisztikus fizika== | ||
A lap 2009. szeptember 12., 15:50-kori változata
Tartalomjegyzék
Vonatkoztatási rendszer
Amikor egy test pozícióját, vagy pályáját akarjuk megadni, valamihez azt viszonyítanunk kell. Viszonyítási alapként felveszünk egy koordinátarendszert (origó, és bázisvektorok, illetve a rendszer időfejlődése, pl.: mozgása, forgása) és ebben tárgyaljuk a mozgásokat. Vannak kitüntetett vonatkoztatási rendszerek, ezeket Newton első törvényével tüntetjük ki: ahol a tehetetlenségi axióma teljesül, azok inerciarendszerek. Különböző mozgású koordinátarendszerekben fellépnek egyéb nemfizikai erők is, az inerciarendszerekben definícióból kifolyólag ilyenek nincsenek. A többi Newton-törvény is inerciarendszerekre érvényes.
Galilei-transzformáció
Newton második axiómája a mozgásokra vonatkozik, azonban az itt tárgyalt differenciálegyenletben van egy szabad konstans, amely a deriválások miatt kiesik, ezért erre invariáns a második axióma. Ez az invariancia a Galilei-transzformációban foglalható össze:


Szavakban elmondva az egymáshoz képest egyenes vonalú egyeneltes mozgást végző koordinátarendszerekben a mechanikai jelenségek azonosan mennek végbe. Az egyes rendszerek között a Galilei-transzformációval térhetünk át.
A Lorentz-transzformáció
Amikor a XIX.-XX. század fordulóján a megpróbálták egységes képbe összehozni a mechanikát és az elektrodinamikát, egyre problémásabb lett az a felismerés, hogy a hullámegyenlet nem invariáns a Galilei-transzformációra. Úgy tűnt, mintha az elektrodinamikában lenne kitüntetett koordinátarendszer, szemben a mechanikával. A korabeliek három feloldását képzelték el a problémának, csökkenő valószínűség szerint:
- A Maxwell féle elmélet hibás, a valódi elmélet Galilei-invariáns.
- A mechanika Galilei-invariáns, az elektrodinamikában van kitüntetett koordinátarendszer, amelyben a fény terjedését lehetővé tevő éter nyugszik.
- Létezik egy mind a mechanikára, mind az elektrodinamikára érvényes relativitási elv, ami nem a Galilei-féle, és ez egyben azt is jelenti, hogy a mechanika törvényeit kell megváltoztatni.
A Maxwell-féle leírást rengeteg kísérlet támasztotta alá, és minden jóslatát sikerült ellenőrizni. A második lehetőséget nem sikerült alátámasztani kísérletekkel, azonban egyre irreálisabb megszorításokat lehett rá adni, amik végső soron tarthatatlanná tették az elméletet. Az új relativitási elmélet kidolgozását Einstein végezte el, két posztulátumra építve:
- A természet törvényei, és a kísérleti eredmények azonosak az egymástól csak egyenes vonalú egyeneltes mozgásban különböző inerciarendszerekben.
- A fénysebessége véges, és forrásának mozgásától független.
Ha feltesszük, hogy a tér izotrop, továbbá az új transzformáció is csoportot alkot a Galileihez hasonlóan, és megengedjük, hogy az idő is transzformálódjon az áttéréskor (és nem szeretnénk véges sebességekből kiindulva végtelen sebességeket kapni a transzformációk és sebességösszeadások során), akkor a 2. posztulátumból és az izortópiából következik az ívelemnégyzet állandósága ( ), a többi feltételből pedig levezethető a Lorentz-transzformációk alakja (1+1 dimenzióban):
), a többi feltételből pedig levezethető a Lorentz-transzformációk alakja (1+1 dimenzióban):

ahol  a Lorentz-faktor.
a Lorentz-faktor.
A c konstans értékét a kísérletek adják meg, itt csak az derül ki, hogy határsebesség, mégpedig felső, az kísérleti tény, hogy ez egyezik a fénysebességgel.
A Michelson-Morley kísérlet
A relativitás elmélet kialakulása felé az egyik nagy lökést ez a kísérlet szolgáltatta azzal, hogy nem mutatta ki az éter hatását. Az elméletileg feltételezett éter a fény terjedésének közege lett volna. Ha ez igaz lenne, akkor a közeghez képest relatív mozgást végző megfigyelő másnak méri a fénysebességet. A kísérletet ezért félév különbséggel megismételték, ekkor ugyanis a Föld éppen ellenkező irányban halad a feltételezett éterben, akármilyen mozgást is végez az. A kísérleti elrendezés egy fényforrásból állt, annak a fényét egy féligáteresztő tükörrel kettéosztották, majd az azonos utakon visszaverődő fénysugarakkal interferenciát hoztak létre. Ez az elrendezés ha az azonos utakon más a fénysebesség eltérést tesz láthatóvá az interferencia segítségével. Az elméletileg megjósolt eltérések a vizsgálati időpontokban nem jelentkeztek, ezért erőteljesen kétségessé vált az éter elmélet tarthatósága.
A Lorentz transzformációk következményei
A Lorentz-transzformációk képleteiből több a klasszikus gondolkodással szembenálló jelenség vezethető le. Ezeken felül hasznos, a különböző rendszerek közötti összefüggések is levezethetőek.
Az inerciarendszerek relatív sebessége
Ahogy korábban láttuk, a Lorentz-transzformációk is csoportot alkotnak. Belátható, hogy a transzformáció csak a sebességtől függ, ezért egyparaméteres a csoport, ekkor van úgynevezett kanonikus paramétere. Ez azt jelenti, hogy ha egymásután csoportelemeket hattatunk, akkot az eredő transzformáció előállítható az egyes elemek paramétereinek összegeként (analógiaként gondoljunk 2D-s forgatásokra: az eredő forgatási mátrix előállítható a részforgatások szögeinek összegeként). A Lorentz-transzformációk ezen paraméterét rapiditásnak nevezzük, ez tehát összeadódik. Definíciója: 
Levezethető a transzformációs szabályokból, hogy bármely két inerciarendszer (amelyek között a  paraméterű Lorentz-transzformáció visz át) relatív sebessége:
paraméterű Lorentz-transzformáció visz át) relatív sebessége:

amiből az is következik, hogy ez a sebesség nem lehet c-nél nagyobb. VIGYÁZAT Ez az egész csak 1 idő és 1 tér dimenzióban igaz, amikoris a tér-tengely egyirányú a sebességgel. Az általános eset bonyolult, azt érdemes megjegyezni, hogy két egymás utáni, de különböző irányú rendszerbe való áttranszformáció (boost) eredője egy megfelelő irányú boost és egy forgatás. Ennek ellenére a rapiditás paraméter az egyirányú boostok kezelésére igen alkalmas, például egy kísérletben a nyaláb és a labor rendszer közötti transzformációkra, amikor a lényeges mozgások egy irányba esnek.
Sebességek összeadása
Az előző formulából a tangens-hiperbolikusz szögösszeadási formuláját felhanszálva:
Ennek kis sebességű (v << c) határesete visszaadja a klasszikus  formulát.
formulát.
Paradoxonok
A paradoxonok az egyidejűség relativitására vezethetőek vissza: ha egy koordinátarendszerben adott egy két esemény, akkor létezik olyan koordinátarendszer is, amelyekben ezek egyidejűek, illetve olyanok is, ahol az egyik, és olyanok is, ahol a másik történik hamarabb.

A legfontosabb paradoxonok a következőek:
- Az álló megfigyelő a mozgó tárgyakat rövidebbnek látja: Lorentz-kontrakció
- Az álló megfigyelő a hozzáképest mozgó rendszerekben eltelő időt hosszabbnak látja: idődilatáció.
- Ikerparadoxon: két iker közül az egyik a Földön marad, a másik egy gyorsuló űrhajóban elmegy, majd visszajön a Földre. Ez utóbbi személy fiatalabbként ér vissza. A gyorsuló rendszerekben inerciarendszerváltás történik, ezekben a pillanatokban változik az egyidejűség is.
Sajátidő
A relativitáselmélet egyik elsőre szokatlannak tűnő következménye az idő relativitása, az, hogy az idő az egymáshoz képest mozgó koordinátarendszerekben nem ugyanúgy telik. Az álló koordinátarendben levő megfigyelőhöz képest (fénysebességgel összemérhető sebességgel) mozgó rendszerben az idő lassabban telik. Érdemes kiszámolni egy a téridő általános görbéje mentén mozgó részecske számára eltelt időt (azt az időt, amit a részecskével együtt mozgó óra mérne). Ha a részecske mozgása nem egyenletes, akkor a hozzá rögzített koordinátarendszer nem inerciarendszer, de minden pillanatban választható egy pillanatnyi inerciarendszer, aminek a sebessége pont megegyezik a részecske sebességével. Egy általános inerciarendszerben (legyen ez a megfigyelő koordinátarendszere) fel lehet írni (egy  pillanatban) a részecske pályáján számított infinitezimális ívhosszat:
pillanatban) a részecske pályáján számított infinitezimális ívhosszat:  Ez az ívelemnégyzet megegyezik a pillanatnyi inerciarendszerben felírt ívelemnégyzettel. A pillanatnyi inerciarendszerben a részecske áll, így itt
Ez az ívelemnégyzet megegyezik a pillanatnyi inerciarendszerben felírt ívelemnégyzettel. A pillanatnyi inerciarendszerben a részecske áll, így itt  , csak az idő telik, így:
, csak az idő telik, így:  . Ebből kifejezhető a részecske pillanatnyi inerciarendszerében vett infinitezimális időtartam:
. Ebből kifejezhető a részecske pillanatnyi inerciarendszerében vett infinitezimális időtartam:

Itt  a részecske sebessége a megfigyelő inerciarendszeréhez képest, a időpontban. Ha adott a részecske pályája a megfigyelő rendszerében (a megfigyelő rendszerében eltelő idő függvényében), akkor az előző egyenletet integrálva megkaphatjuk, hogy mennyi
a részecske sebessége a megfigyelő inerciarendszeréhez képest, a időpontban. Ha adott a részecske pályája a megfigyelő rendszerében (a megfigyelő rendszerében eltelő idő függvényében), akkor az előző egyenletet integrálva megkaphatjuk, hogy mennyi  idő telik el a részecskével együtt mozgó rendszerben a megfigyelő rendszerében eltelt
idő telik el a részecskével együtt mozgó rendszerben a megfigyelő rendszerében eltelt  idő alatt:
idő alatt:

Az első integrál a mozgó rendszerben van felírva, ezt írtuk át a megfigyelő rendszerében elvégezhető integrállá, a részecske pillanatnyi sebessége a megfigyelő rendszerében. A gyökös kifejezés értéke mindig kisebb, mint  , így láthatóan a mozgó rendszerben eltelő idő rövidebb:
, így láthatóan a mozgó rendszerben eltelő idő rövidebb:  .
Az első integrál mindig a pillanatnyi inerciarendszerekben értendő (amikhez képest a részecske áll), így
.
Az első integrál mindig a pillanatnyi inerciarendszerekben értendő (amikhez képest a részecske áll), így  , így a kiszámolt mennyiség a téridőbeli görbe ívhosszával arányos. A mennyiséget a részecske sajátidejének nevezzük, és értéke bármely inerciarendszerből számolva ugyanaz (az ívhossz invariáns), így jól alkalmazható a téridőbeli görbék paraméterezésére.
, így a kiszámolt mennyiség a téridőbeli görbe ívhosszával arányos. A mennyiséget a részecske sajátidejének nevezzük, és értéke bármely inerciarendszerből számolva ugyanaz (az ívhossz invariáns), így jól alkalmazható a téridőbeli görbék paraméterezésére.
4-es formalizmus, kinematika
A helyvektor
A téridőben egy pontot egy valamely inerciarendszerhez viszonyított 4 (egy idő- és 3 tér-) koordinátával lehet meghatározni. Érdemes ezeket egy 4 komponensű vektorba foglalni:  . A vektor komponenseit jelölő indexet ebben az esetben fentre szokás tenni, és a számozás 0-tól indul. Így:
. A vektor komponenseit jelölő indexet ebben az esetben fentre szokás tenni, és a számozás 0-tól indul. Így:  . Az indexeket általánosan görög betűkkel szokás jelölni (egy egyenletben
. Az indexeket általánosan görög betűkkel szokás jelölni (egy egyenletben  jelölheti az
jelölheti az  4-esvektor bármelyik komponensét;
4-esvektor bármelyik komponensét;  )
)
Áttérve egy másik koordinátarendszerbe egy Lorentz-transzformációt kell elvégeznünk. A transzformáció kifejezhető a fenti vektor egy mátrixxal szorzásával: 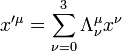 , ahol
, ahol  a Lorentz-transzformáció mátrixa (az összegzőindexe alul van). A továbbiakban az ehhez hasonló képletekből a
a Lorentz-transzformáció mátrixa (az összegzőindexe alul van). A továbbiakban az ehhez hasonló képletekből a  jelet elhagyjuk (ahogy az az irodalomban megszokott), a kétszer (egy alul és egy felül) előforduló indexekre automatikus összegzés értendő. A Lorentz-transzformáció mátrixa például irányú boost esetén:
jelet elhagyjuk (ahogy az az irodalomban megszokott), a kétszer (egy alul és egy felül) előforduló indexekre automatikus összegzés értendő. A Lorentz-transzformáció mátrixa például irányú boost esetén:
Alsó indexes vektorok, abszolút érték
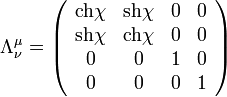
Az alsó indexes vektorok bevezetése a metrikus tenzor segítségével történhet, ami a speciális relativitáselméletben:
Megjegyezzük, hogy a metrikus tenzor  -szerese is jó választás lenne, az irodalomban mindkettő előfordul, egy relativitáselmélettel foglalkozó számolás elején érdemes leszögezni, hogy az ember éppen melyik konvenciót használja. Az alsó indexes vektorokat az
-szerese is jó választás lenne, az irodalomban mindkettő előfordul, egy relativitáselmélettel foglalkozó számolás elején érdemes leszögezni, hogy az ember éppen melyik konvenciót használja. Az alsó indexes vektorokat az  képlettel definiáljuk (itt is természetesen
képlettel definiáljuk (itt is természetesen  -ra összegzés értendő), így
-ra összegzés értendő), így  . A metrikus tenzorral szorzást az indexek lehúzásának nevezzük. Az egyenletekben általános szabály, hogy egy indexnek mindkét oldalon ugyanott (vagy alul, vagy felül) kell szerepelnie. Természetesen az indexek lehúzása invertálható, az alsó indexes vektorokból a
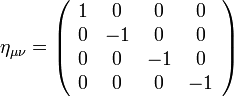
. A metrikus tenzorral szorzást az indexek lehúzásának nevezzük. Az egyenletekben általános szabály, hogy egy indexnek mindkét oldalon ugyanott (vagy alul, vagy felül) kell szerepelnie. Természetesen az indexek lehúzása invertálható, az alsó indexes vektorokból a  összefüggéssel kaphatunk felső indexeseket, ahol az
összefüggéssel kaphatunk felső indexeseket, ahol az  az alsó indexessel numerikusan megegyező mátrix, algebrai értelemben azonban az inverze, az alsó és felső indexes
az alsó indexessel numerikusan megegyező mátrix, algebrai értelemben azonban az inverze, az alsó és felső indexes  -kat összeszorozva a
-kat összeszorozva a  -es egységmátrixot kapjuk:
-es egységmátrixot kapjuk:
Ha egy alsó indexes vektort akarunk transzformálni, ahhoz a Lorentz-mátrix indexeit is le- illetve fel kell húznunk, ami a vektorindexekhez hasonlóan tehető meg.
Egy 4-esvektor abszolútértéknégyzetén az  szorzatot értjük. Ennek a lényege az, hogy ilyen definíciókkal számolva egy infinitezimális elmozdulásvektor abszolútértéknégyzete éppen az ívelemnégyzetet adja:
szorzatot értjük. Ennek a lényege az, hogy ilyen definíciókkal számolva egy infinitezimális elmozdulásvektor abszolútértéknégyzete éppen az ívelemnégyzetet adja:

Általános 4-es tenzorok
Természetesen nem csak a koordináták, illetve a különbségeik alkotnak 4-esvektort, hanem bármilyen olyan 4 fizikai mennyiség, amik egy másik inerciarendszerbe áttérve a koordinátákhoz hasonlóan (a megfelelő Lorentz-transzformációs mátrixxal) transzformálódnak. Ilyenek például az elektrodinamikában a potenciálok (az elektrosztatikus potenciál és a vektorpotenciál 3 komponense).
Be lehet vezetni a többindexes 4-estenzorokat is, ezeknek az a definíciója, hogy a másik koordinátarendszerbe áttérve mindegyik indexük a 4-esvektorokhoz hasonlóan transzformálódik:

Az elektrodinamikában például az elektromos és mágneses térerősségek komponenseiből lehet egy 4-es tenzort alkotni.
A fizikai egyenletekre való követelmény az, hogy mindkét oldalon ugyanúgy transzformálódó mennyiségek legyenek.
Pontrészecske pályájának a leírása
Egy pontrészecske mozgását egy inerciarendszerből nézve megadhatjuk annak a pályáját (azaz a 4-es helyvektort) valamilyen paraméter függvényében. Az egyik legegyszerűbb választásnak tűnik, hogyha a részecske koordinátáit az inerciarendszerbeli idő függvényében adjuk meg. Sok esetben hasznosabb viszont, ha a koordinátákat az eltelt sajátidő függvényében adjuk meg (azaz a  függvényt adjuk meg), ami a geometriában a görbék ívhossz szerinti paraméterezésének felel meg (az sajátidő az ívhosszal arányos).
függvényt adjuk meg), ami a geometriában a görbék ívhossz szerinti paraméterezésének felel meg (az sajátidő az ívhosszal arányos).
A részecske sebességénél egy adott rendszerből nézve megadhatjuk az abban a rendszerben mért sebességet (a koordináták idő szerinti deriváltját), ez az adott rendszerben jellemzi a mozgást. (Az idő egy négyesvektor komponense, így minden rendszerben más, így az idő szerinti deriválás eredménye nem lesz négyesvektor.)
Hasznos bevezetni a részecske 4-es sebességét, ami a helykoordinátáknak a sajátidő szerinti deriváltja:

Mivel a hely négyesvektor és a sajátidő skalár, ezért a négyessebesség is 4-esvektor lesz, viszont a komponensei nem mérhetőek közvetlenül, a szokásos sebességméréssel a klasszikus mechanikában megszokott hármas sebességet tudjuk mérni. Kihasználva a sajátidőre vonatkozó  összefüggést, a négyessebesség komponensei kifejezhetőek a mérhető hármas sebességgel:
összefüggést, a négyessebesség komponensei kifejezhetőek a mérhető hármas sebességgel:
Itt  a hármas sebesség (a helykoordináták idő szerinti deriváltja a megfigyelő inerciarendszerében).
a hármas sebesség (a helykoordináták idő szerinti deriváltja a megfigyelő inerciarendszerében).
A négyessebesség abszlútértéke:
Érdemes még definiálni a négyes gyorsulást is, amit a négyessebesség további (sajátidő szerinti) deriválásával kapunk:
A négyessebesség abszolútértékére kapott egyenlőség deriválásával könnyen belátható a  összefüggés is.
összefüggés is.
Egyenletesen gyorsuló mozgás
(ez egy jól követhető, szemléletes példa lenne az előző szakaszban bevezetett fogalmakra és gyakorlati alkalmazásukra)
Relativisztikus fizika
A relativitáselméletben csak olyan mennyiségeket engedünk meg, amelyek invariánsak a Lorentz-transzformációra. Ez azt jelenti, hogy a klasszikusan ismert mennyiségeket valahogy át kell alakítani, hogy ne a Galilei-transzformációra legyenek invariánsak, hanem a Lorentzre. Az általános an levezethető 3+1 dimenziós Lorentz-transzformáció az ívelemnégyzetet változatlanul hagyja:

Ez úgy interpretálható, hogy a relativitáselméletben a tér és az idő együtt alkot egy kovariáns mennyiséget. Hasonlót láthattunk a klasszikus geometriában, az ottani transzformációk a térbeli távolságnégyzetet (skalárisszorzatot) tartották változatlanul, ezzel definiáltuk a vektorokat. Ezzel az analógiával élve vezetjük be itt is a vektorokat, melyeket megkülönböztetésképpen négyesvektornak nevezünk, a négyesvektorok skalárisszorzatát a Lorentz-transzformáció változatlanul hagyja. A klasszikus mennyiségekből tehát négyesvektorokat kell létrehoznunk. Például:
Ez utóbbi különösen jelentős, hiszen ennek a hossznégyzete a részecske nyugalmitömegével áll kapcsolatban:
Ebből az is következik, hogy ez minden rendszerben ugyanaz. Belátható, hogy az itt definiált négyesimpulzussal egybefoglalható az energia és az impulzusmegmaradás, mert a négyesimpulzus maga a megmaradó mennyiség a relativitáselméletben. Ezt átrendezve az E-p összeüfggést kaphatjuk meg, ami diszperziós relációként is felfogható:

Ez pedig álló részecskére a híres:

képletet adja. Nemrelativisztikus esetekben továbbra is visszakapjuk a klasszikus képleteket.
A relativisztikus dinamika alaptörvényeként a Newton-törvény relativisztikus megfogalmazását vehetjük. A klasszikus  -val egyenértékű kis sebességekre az
-val egyenértékű kis sebességekre az
 ,
,
ez utóbbi azonban relativisztikusan is igaz, itt a részecske nyugalmi rendszerében mért idő (sajátidő), ami kis sebességekre a mindenkori idővel helyettesíthető. Fontos, hogy az időderiválás alól a tömeg nem emelhető ki, hiszen ez is függ a sebességtől, tehát sebességváltozáskor ez is változik.
A fenti energia kifejezésnek van még egy fontos következménye. Ha egy rendszer két állapota közötti átmenet energia kisugárzással, vagy elnyeléssel jár, akkor az a rendszer tömegét is megváltoztatja. Ennek legékesebb példája a periódusos rendszerben megfigyelhető moláristömegek értéke. A periódusosrendszerben szereplő magok mélyebb energiaszinten vannak, mint az alkotóik külön-külön összeadva, ezért a két állapot közötti különbség valamikor felszabadult, és ekkor tömeget is elvitt, tehát a periódusos rendszerbeli tömegek mindig kisebbek, mintha a protonok, és neutronok szabad tömegét adnánk össze. Ezt az effektust nevezik tömegdefektusnak.
Az elektrodinamika relativisztikus formája (*)
Az elektrodinamika már eleve egy relativisztikus diszciplína, így a Maxwell-egyenletek relativisztikus általánosára nincs szükség. Ez úgy fejezhető ki, hogy a Maxwell-egyenletek átírhatók szembeötlően kovariáns egyenletekké.

Következésképpen B felírható mint egy vektorpotenciál rotációja:

Ha ezt behelyettesítjük az elektromos tér rotációját leíró egyenletbe, akkor akövetkezőt kapjuk:
így a zárójelben lévő kifejezés felírható, mint egy skalártér gradiense:
Ez a  skalár- és
skalár- és  vektorpotenciálok szokásos definíciója. Könnyen belátható, hogy a potenciálok egyértelműen meghatározzák a térerősségeket, de ez fordítva nincs így. A potenciálok rögzítéséhez mértéket szokás előírni. Ezt a feltételt pedig érdemes úgy megadni, hogy maga is szembeötlően kovariáns legyen. Olyan megszorítást érdemes megtenni, hogy a skalár- és vektorpotenciálokból egy
vektorpotenciálok szokásos definíciója. Könnyen belátható, hogy a potenciálok egyértelműen meghatározzák a térerősségeket, de ez fordítva nincs így. A potenciálok rögzítéséhez mértéket szokás előírni. Ezt a feltételt pedig érdemes úgy megadni, hogy maga is szembeötlően kovariáns legyen. Olyan megszorítást érdemes megtenni, hogy a skalár- és vektorpotenciálokból egy  négyesvektort lehessen csinálni.
négyesvektort lehessen csinálni.
Belátható, hogy a  áramsűrűség egy négyesvektor. Ekkor az elektrodinamika kontinuitási egyenlete:
áramsűrűség egy négyesvektor. Ekkor az elektrodinamika kontinuitási egyenlete:

Most emlékezzünk vissza Lorenz-mérték definíciójára:
és arra, hogy ezen mértékben a négyespotenciálokra a következő hullámegyenletek adódtak:
Namost, mivel a jobboldal négyesvektor, és a d'Alembert operátor a koordinátarendszer megváltozásával nem változik, ezért az  is négyesvektor. Négyesvektor jelölésben a hullámegyenlet:
is négyesvektor. Négyesvektor jelölésben a hullámegyenlet: